Building a ZMR250 FPV Race quad
October 28th, 2015
So after I built a weed whacker of a tricopter, I decided it was way too big to learn on. It’s great for nice smooth Aerial Video flying but doesn’t fit many places when taking off and landing safely.
So after watching a number of videos on FPV Race Quads, I figured I would see how to build one fairly cheaply.
For the build I chose a clone of the Blackout quad, the ZMR250.
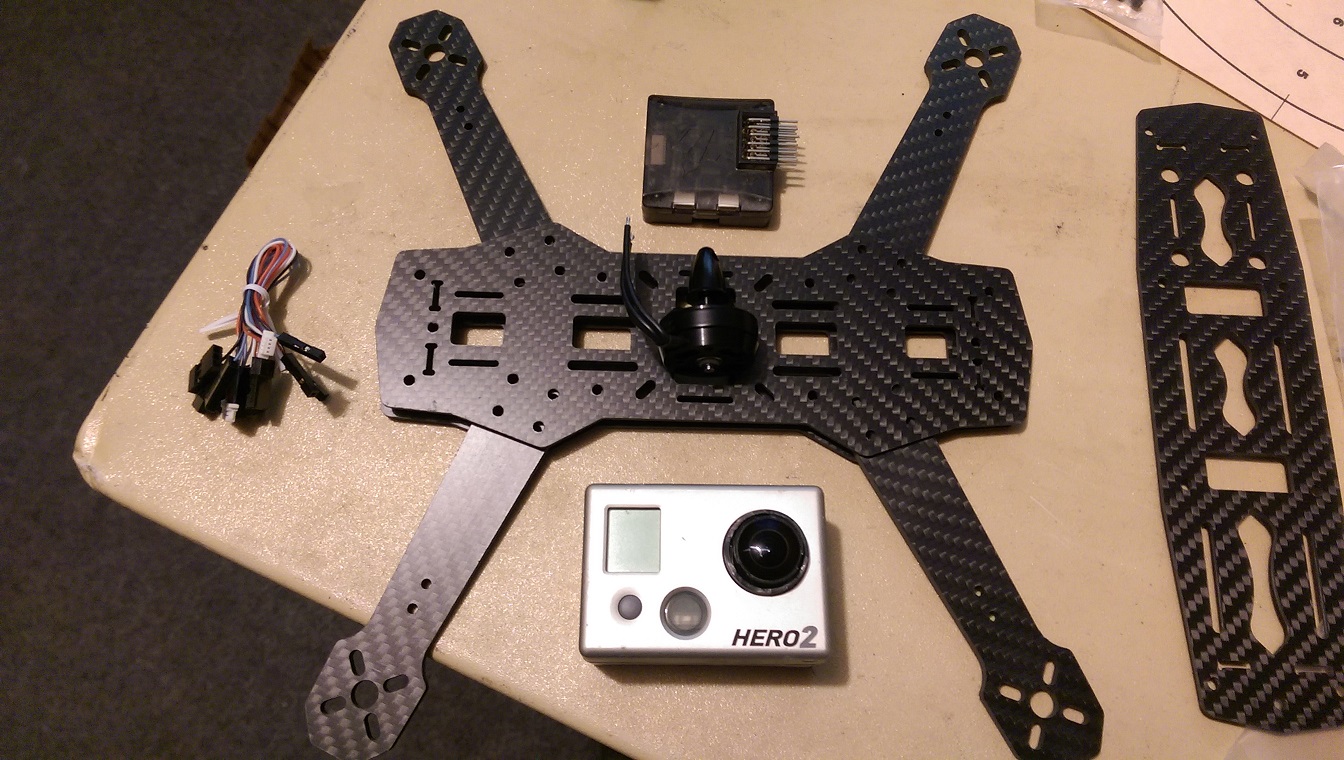
I mocked the whole thing up with masking tape to determine where everything should go to fit nicely.

I ordered some 3mm spacers and nylon standoffs for the top plate. The 3mm spacers will allow me to separate the bottom plates by 6mm to allow for my esc wiring. I created a simple PDB with copper clad, then I heat shrink it to protect it from shorting.

There were some challenges. First was that the open pilot cc3d board ($17 from buddy rc) is no longer supported by open pilot. In fact it appears OP has collapsed all together. Thankfully some of the devs went over to Taulabs. I had been looking at a BrainFPV board running Taulabs because it incorporates the OSD on the board. It’s a little pricey at $100 though so I’ll stick with this until I get better.
Once I had the board, I was able to update it to the latest TL software using their GCS. Then I began the setup wizard.
To be able to connect for tuning in the field, I decided to get a HC-05 bluetooth module. This was a little bit of a PITA. To update the BR to 57600 as required by the FC, I had to connect it to an FTDI TTL usb to serial adapter. THen to get into programming mode you have to hold the reset while applying power. This causes a slow blink meaning command mode. I was then able to issue commands through putty like AT+UART=57600,1,0. I also issued a AT+NAME command however this cause it to reboot. It did accept the new name though as ZMR250.
Here are the specs:
ZMR250 frame
SunnySky 2204 2300kv motors
RMRC BLHeli 12A ESC with oneshot and braking
GemFan 5×3 props (to start)
OP CC3D board
HC-05 Bluetooth
3S-1300 45C battery
More to come as time permits!
Update! 1/27/16
I spent a while trying to get TauLabs software to work with the cc3d in that I wanted autotune. There isn’t enough stack room to enable the module and bluetooth, so you have to disable BT telem. Then when you run the autotune, it will fail to reconnect to the GCS to save the settings. This was incredibly frustrating. I tried to run it this way multiple times with the same result. Fortunately, some contributors forked the project for more rapid releases under a fork called DRonin.
The website is http://dronin.org/
So far I’ve installed this successfully on my CC3D. Once installed I was able to enable autotune and run a props off test of the module. Of course the settings were really off the wall but it worked. Another nice feature of the DRonin version is that it saves the values when you disarm as long as you don’t change flight modes. If you change flight modes the settings are reverted. You are not required to connect to the GCS like TauLabs to save the changes. I did test it though, and it did reconnect. So another big plus for DRonin.
Once we get dug out of the snow, I’ll give it a shot and upload the results.